国产四足A1机器狗是一款功能齐全的四足机械狗,它坚固耐用,可以跳跃,翻转,每小时可以走十英尺。A1机器狗主要功能包括出色的性能和速度,同时保持稳定性。它具有一个多眼智能深度相机,可提供更高的精度,并支持实时高清视频传输。而且,它可以通过动态避障来帮助任何人解决任何问题,还可以理解手势识别。



参数:开源ROS系统、12个自由度、视觉导航,适应任何地形、能跑能跳、能后空翻
简述:A1 四足机器狗提供运动控制和智能感知两个开发接口,便于用户快速便捷地进行算法开发,可应用于机器人领域的多学科实践教学、科学研究以及专业竞赛。
1、更快的奔跑速度:国内近似规格最快

1)最大持续室外奔跑速度3.3m/s(11.88km/h),基于公开检索应该是目前国内近似规格奔跑速度最快最稳的中小型四足机器人。注:近似规格全球最快速度目前是MIT在跑步机上实现的3.7m/s。
2)3.3m/s(11.88km/h)的速度和成年人慢跑的速度差不多,一个人的休闲跑步再也不会孤单。
2、更加卓越的运动稳定性

直接奔跑下高台阶

“斗狗” “竞技”

高处跌落
3、近似规格全球最极致的专利动力系统



在机器人领域,极致的动力系统带来极致的运动性能,非常适合参加各种机器人比赛,不然相比别的团队就直接输在起跑线了!
极致的动力系统,也正是目前A1实现高速奔跑的其中一个关键所在。
4、全新专利的机身结构及布局设计

1)高强度轻巧机身结构,维护简易方便;
2)24V外部电源输入接口,5V、12V、19V对外输出电源,方便外接各种扩展设备;
3)标配高性能机载双主控(感知主控和运动主控),外置接口4*USB、2*HDMI、2*Ethernet;主控可选配升级至TX2等;
4)标配Realsense深度相机,建图和避障功能,正在持续升级中;
5、灵敏的专利足端触地感知

1)各足端集成力传感器,方便机器人在任何运动状态下,直接实时感知足端接触状态。相比仅用关节电机电流感知估计足端力存在的编码器误差、惯性张量误差、传动间隙误差等,更加简洁直观方便,灵敏度高;
2)当然,程序中整合硬件力传感器和电机电流感知足端力相结合的方式,会带来更优的灵敏度和可靠性;
3)足端防水防尘、足端使用磨损后更换方便;
6、基于视觉的自主人员跟随、避障

7、可选配高精度激光雷达


超级友好的用户接口

1)用户PC直接可以用以太网连接机器人内置机载双主控;或用户高性能PC直接以太网连接控制机器人底层控制器;机器人底层控制器、机器人机载双主控和用户PC可以自由的相互通信,方便视觉感知等数据的实时互相传递;
2)开放底层控制:可以实时读取和控制机器人的所有电机和传感器,方便直接使用开源机器人算法;
3)开放高层控制:可以直接给机器人发送前后左右移动等高层运动命令;
4)已在给海外最顶级科技公司的我们公司早期的产品中,广泛长时间验证使用。
机器狗系统主要包括以下部分:
·实时操作系统:Ubuntu,Ubuntu-ROS
·丰富的外置接口: HDMI×2, 以太网口×2, 高速串口×2, USB 3.0×4
·高清图传:自研
·IMU:自研
·激光:单线或多线(选配)
·深度相机:Intelrealsense(标配)
·锂电池:24V14Ah
关于教学应用

关于科研应用
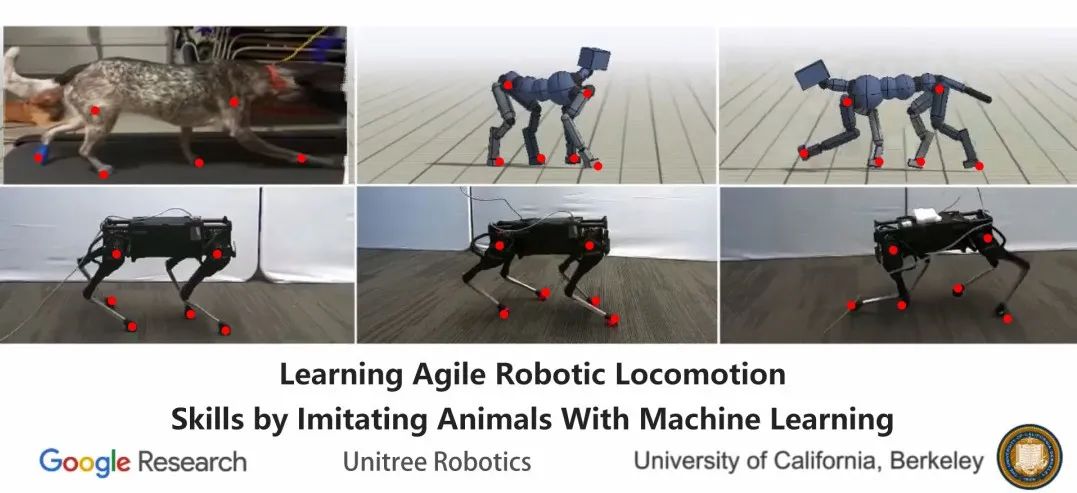
Google AI实验室与加州伯克利大学通过中国版机器狗开展
“Learning Agile Robotic Locomotion Skills by Imitating Animals”
动作模仿要点掌握之后,为了能让机器狗完美复刻动作,像真狗狗一样灵活自如,防止机器狗出现站不稳、摔倒等情况,研究人员又通过一个有效样本的领域自适应过程,将框架策略迁移真的机器狗上。为方便将动作迁移到真机器狗上,研究人员还在训练过程中将模拟动作形态随机化,其中的动作变量包括质量、惯性、运动作用力、运动摩擦力等。

机器狗A1
- 整机重量 ( 含电池 ):12kg
- 尺寸(站立):500×300×330mm(长 × 宽 × 高)
- 尺寸(折叠):450×300×150mm(长 × 宽 × 高)
- 最大室外奔跑速度:3.3m / s
- 工作时间:1-2.5h
- 高清实时视频传输:延迟 0.1-0.2s
- 12 个自由度
- 有效负载:5kg
- 机身输出电源:5V, 12V, 19V
电机
- 关节扭矩:33.5NM
- 关节最大速度:21.01 rad / s
- 关节支持快速拆卸且易于维护
- 读取所有传感器数据
- 可给每个电机分别发送位置,速度和扭矩命令
支持功能
- 急停保护、跌落保护、过热保护
- 低压警示、过温警示、短路警示、过充警示
-2 个实时操作系统:
运动控制:Ubuntu
环境感知:Ubuntu-ROS
-4 个足端压力传感器:
准确获取脚部支撑信息,更可靠,高效,便捷
- 丰富的外置接口 :
HDMI×2, 以太网口 ×2, 高速串口 ×2, USB 3.0×4
应用方向
- 科研教育 娱乐酷玩
- 安保巡检 勘探救援
- 快递物流 陪伴看护


中国总部·青岛Email:mail@qdtianju.com
河南分公司·郑州Email:wx@qdtianju.com