波士顿动力公司(Boston Dynamics)是由美国马克·雷博特(Marc Raibert)于1992年创建的一家工程与机器人设计公司,最早因研发的大狗(Big Dog)而被世界闻名,波士顿动力公司的使命是想象和创造出能丰富人们生活的非凡机器人。
由该公司设计的Spot mini是一款灵活的四足机器人,设计坚固耐用且可定制。它非常适合非结构化环境,并且完全能够爬楼梯并穿越崎岖的地形。

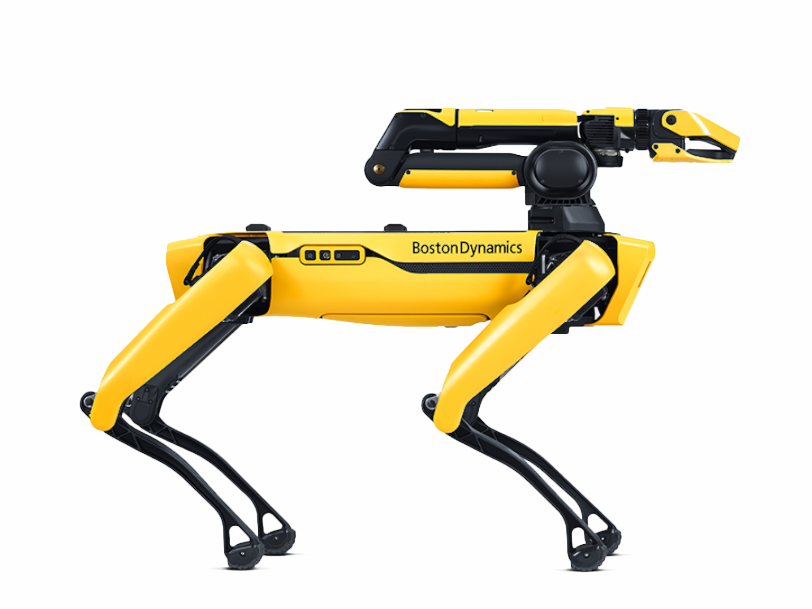
简述:Spot 是一款四足机器人,能够以前所未有的轻松爬楼梯和穿越崎岖地形,但又足够小,可以在室内使用。 Spot 构建为坚固耐用且可定制的平台,在支持跨多个行业的远程操作和自主传感方面拥有良好的记录,并且非常直观,使您能够专注于自己最擅长的工作。
Spot mini可以开箱即用,直接在ROS系统中工作,使您无需学习新界面,可创建自己的 ROS 驱动程序即可进行下一步操作。通过使用随附的 ROS 驱动程序,轻松控制机器人,同时访问所有机载传感数据流,包括来自机载摄像头中的里程计、图像和点云,以及你可选择整合任何其他有效载荷的数据。
Spot mini配备专用计算机、电源和通信接口以及灵活的有效载荷安装系统,使您可以轻松集成各种支持 ROS 的传感器和组件。通过集成 IMU、附加摄像头、雷达、激光雷达、机械手(如 Kinova Gen3 lite 或 HEBI 臂)和自定义有效载荷,根据您的应用完全定制 Spot。
我们是一家经验丰富的集成商,拥有ROS 专家团队。可以帮助您选择正确的负载配置,甚至可以为您集成和定制 Spot,以便您开箱即用。
Spot mini能够穿越崎岖、非结构化的地形,也可适合小空间的室内使用,适用于各种研究应用和行业,包括遥感和检查、施工监测、现场记录、辐射检测、环境监测等。
外形尺寸 (长X宽X高) | 1110毫米x 500毫米x 840毫米 |
重量 | 32.5公斤 |
最大有效载荷 | 可用11公斤,总计14公斤 |
最大速度 | 1.6 m / s(3.5英里/小时) |
运行时间 (无有效负载) | 90分钟 |
电源供应 | 150V时24V,150V时12V,10W时5V |
驱动程序和API | ROS Kinetic,Melodic,C ++,Python,RViz和URDF支持 |
.jpg")
.jpg")
.png")
.jpg")


中国总部·青岛Email:mail@qdtianju.com
河南分公司·郑州Email:wx@qdtianju.com